175-0755-2151(同微)


联系人:潘小姐
手机:17507552151(微信同步)
电话:0755-85275462
Q Q:946445659
邮箱:psq@hw-robots.com
网址:www.hw-robots.com
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼

一、产品概述
我们精心打造的人形机器人手部组件,是融合前沿机械设计、精密制造工艺与先进传感技术的结晶。该组件旨在赋予人形机器人高度拟人的手部操作能力,使其能够精准、灵活地完成各类复杂任务,从精细的装配作业到日常物品的抓取与操控,均可轻松胜任,为机器人在工业、服务、医疗等多元领域的深度应用奠定坚实基础。
二、设计与构造
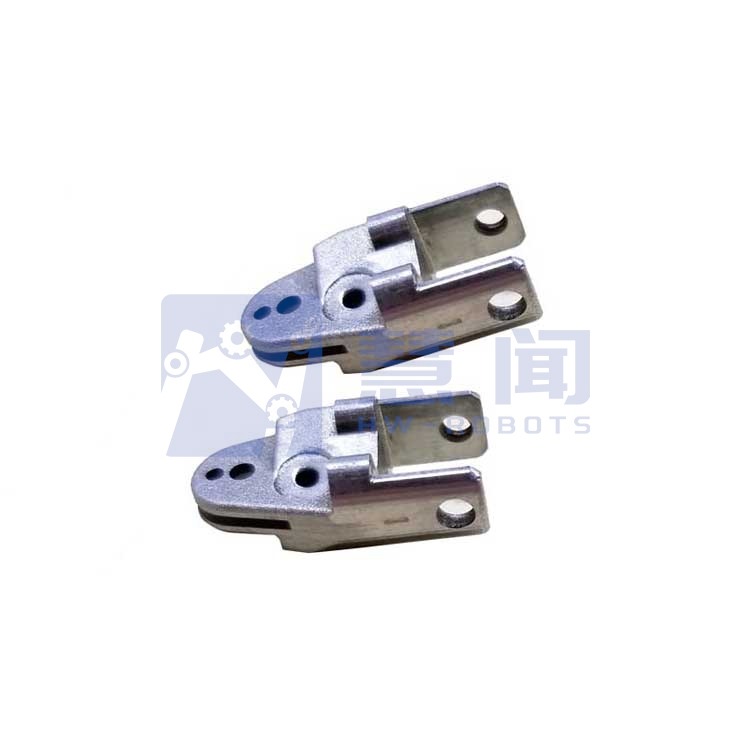
仿生学设计理念:手部组件的外形与关节结构紧密参照人类手部,拥有灵活的五指,包括拇指、食指、中指、无名指和小指,各手指关节具备多个活动自由度,能够模拟人类手部丰富的抓握、捏取、握持等动作,实现自然流畅的操作。
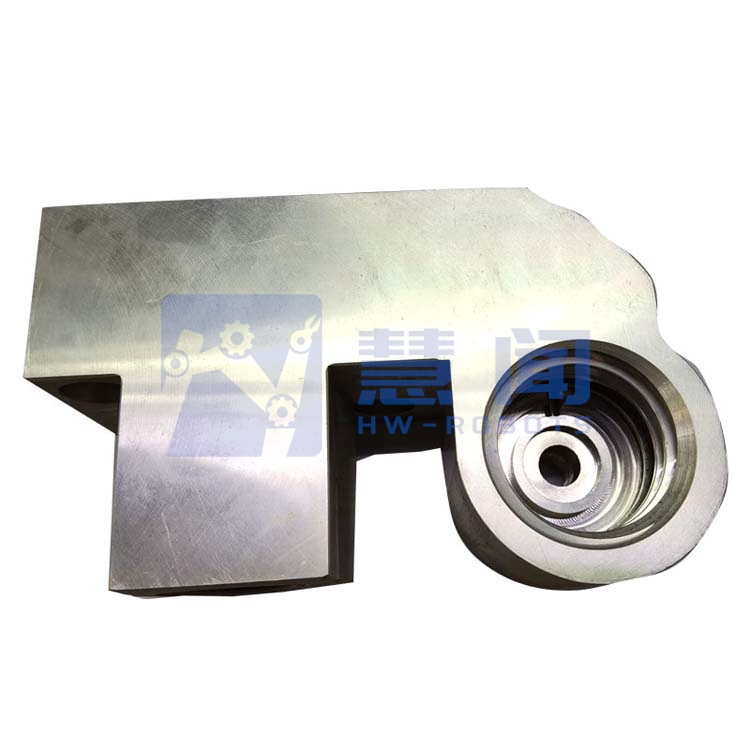
轻质高强度材料应用:为兼顾手部组件的轻量化与耐用性,关键部件选用航空级铝合金及高强度碳纤维复合材料制造。铝合金提供了良好的强度与刚性,确保组件在承受较大外力时不易变形;碳纤维复合材料则显著减轻了整体重量,降低机器人的能耗,同时增强了部件的抗疲劳性能,延长使用寿命。
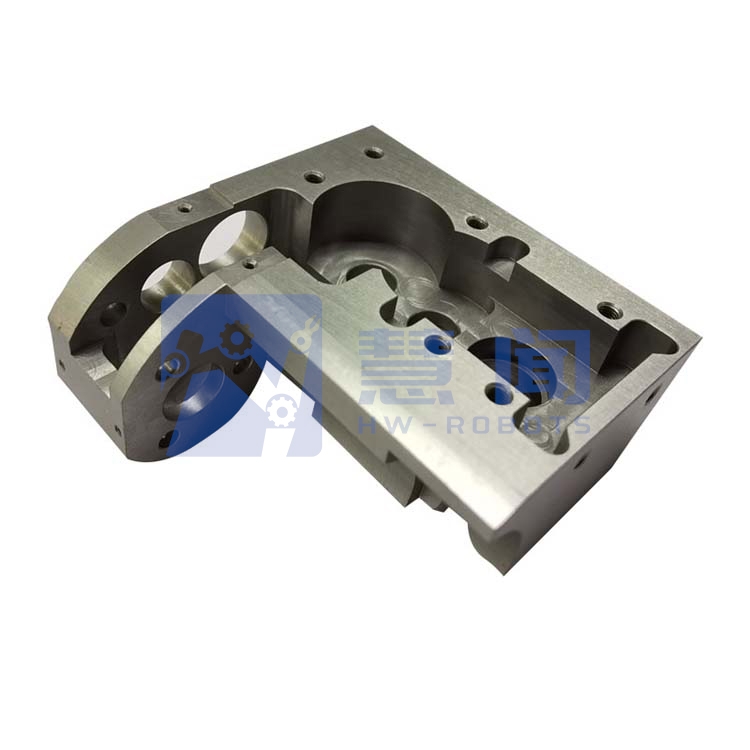
精密传动系统:内部搭载精密齿轮传动与线缆传动相结合的系统。齿轮传动用于提供稳定、精 确的扭矩传递,确保手指关节在运动过程中的位置精度和力的输出控制;线缆传动则实现了部分关节的轻量化设计,通过巧妙的布线与张力调节,使手指能够实现快速、灵活的屈伸动作,两者协同工作,保障手部组件高效、可靠地运行。
三、技术特点
高自由度运动控制:手部组件总计具备 [X] 个自由度,各关节由高性能伺服电机独立驱动。通过先进的电机控制算法,可实现对手指运动轨迹、速度和加速度的精 确调控,能够完成复杂的三维空间动作,如在狭小空间内精准抓取不规则形状的物体,极大提升了机器人操作的灵活性与适应性。
力觉与触觉感知技术:在指尖和手掌部位集成了高灵敏度的力觉传感器与触觉传感器。力觉传感器可实时感知抓取物体时所施加的力的大小与方向,防止因用力过大损坏物品或因抓握力不足导致物品掉落;触觉传感器则能够感知物体表面的纹理、质地等信息,使机器人在操作过程中如同人类一般,能够通过触摸分辨不同材质的物体,为精细操作提供重要依据。
视觉协同技术:与机器人的视觉系统紧密协同,通过视觉识别物体的形状、位置和姿态信息,手部组件能够快速做出相应的动作规划,实现精准抓取。同时,在操作过程中,视觉反馈可实时纠正手部的运动偏差,确保操作任务的顺利完成,提高操作的准确性与成功率。
四、核心优势
卓越的灵活性与精准度:凭借高度拟人化的设计和先进的运动控制技术,可完成极其精细的操作任务,如电子元器件的装配、外科手术中的辅助操作等,操作精度可达毫米级,为相关行业提供了高效、可靠的自动化解决方案。
强大的环境适应能力:力觉、触觉与视觉感知技术的融合,使手部组件能够快速适应不同的工作环境和物体特性。无论是在高温、低温等极端环境,还是面对表面粗糙、光滑、易碎等各类材质的物体,均能稳定、安全地进行操作,有效拓宽了机器人的应用场景。
高可靠性与耐用性:采用优质材料和精湛制造工艺,经过严格的质量检测与可靠性测试,确保手部组件在长期、高强度的工作条件下稳定运行。关键部件的平均无故障工作时间(MTBF)长达 [X] 小时,降低了维护成本,提高了机器人的整体使用效率。
五、应用场景
工业制造领域
精密装配:在 3C 产品制造、汽车零部件装配等行业,能够精准抓取、安装微小零部件,提高装配精度和生产效率,减少人工操作带来的误差和疲劳。
物料搬运与分拣:可快速识别、抓取不同形状和重量的物料,并根据预设规则进行分拣,实现自动化物流仓储管理,提升物流效率。
医疗服务领域
手术辅助:在外科手术中,协助医生进行精细操作,如血管缝合、组织抓取等,降低手术难度,提高手术的精准性和安全性。
康复护理:帮助康复患者进行手部功能训练,模拟人手的抓握动作,为患者提供个性化的康复治疗方案,促进患者手部功能的恢复。
日常生活服务领域
家庭服务:帮助老年人或行动不便者完成日常生活中的各种任务,如开门、拿取物品、打扫卫生等,提高他们的生活自理能力和生活质量。
餐饮服务:在餐厅中,能够完成点餐、上菜、收拾餐具等工作,为顾客提供高效、优质的服务,提升餐饮服务行业的运营效率。