175-0755-2151(同微)


联系人:潘小姐
手机:17507552151(微信同步)
电话:0755-85275462
Q Q:946445659
邮箱:psq@hw-robots.com
网址:www.hw-robots.com
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
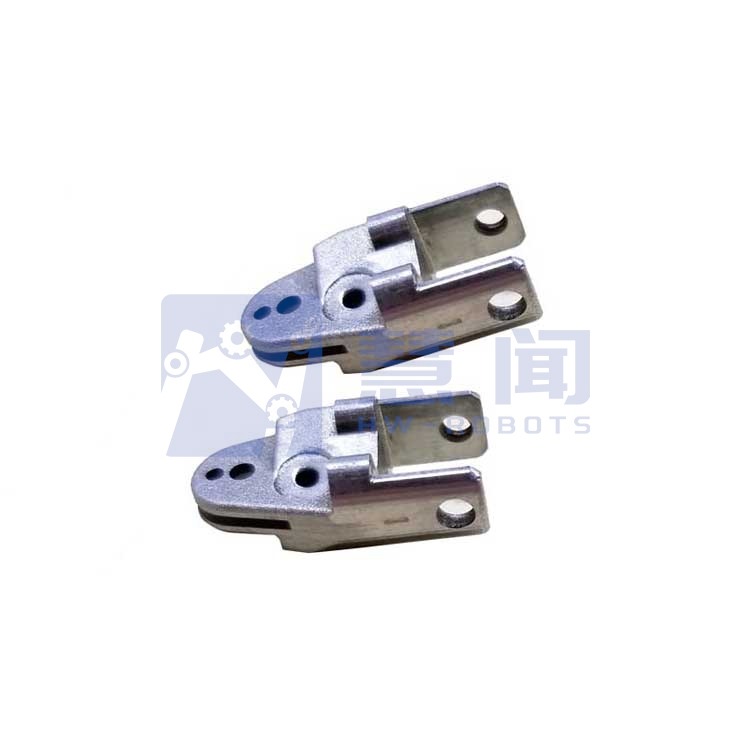
在机器人零件加工领域,四足机器人的结构件加工尤为复杂,其中应力变形问题是影响产品质量的关键因素。机械加工过程中产生的应力不仅会降低零件精度,还可能影响机器人的运动性能和寿命。本文将深入探讨四足机器人零件加工中避免应力变形的有效方法。
材料选择与预处理
机器人零件加工的首要环节是选择合适的材料并进行适当预处理。对于四足机器人而言,常用的铝合金、钛合金等材料在机械加工前需要进行退火处理,消除材料内部残余应力。特别值得注意的是,零件加工前的材料状态直接影响后续加工质量,因此必须确保材料经过充分应力释放。
在机械加工行业中,经验表明采用均匀性好的材料能够显著减少加工后的变形风险。对于高精度要求的四足机器人部件,建议选用经过严格质量控制的预拉伸板材或棒材,这类材料内部应力分布更为均匀,有利于后续机器人零件加工过程的稳定性。

加工工艺优化
合理的加工工艺是避免机器人零件加工应力变形的核心。在机械加工过程中,应遵循"先粗后精"的原则,通过分阶段加工逐步释放材料应力。粗加工阶段可保留较大余量,待应力释放后再进行精加工,这种方法在四足机器人关节部件加工中效果尤为显著。
切削参数的优化也不容忽视。在零件加工过程中,过大的切削力和过高的切削温度都会引入新的应力。建议采用小切深、高进给的切削策略,配合适当的冷却液使用,可有效降低切削区域的温度梯度,减少热应力产生。对于四足机器人特有的复杂曲面部件,采用高速铣削技术能够获得更好的表面质量和更小的加工应力。
工装设计与应力释放
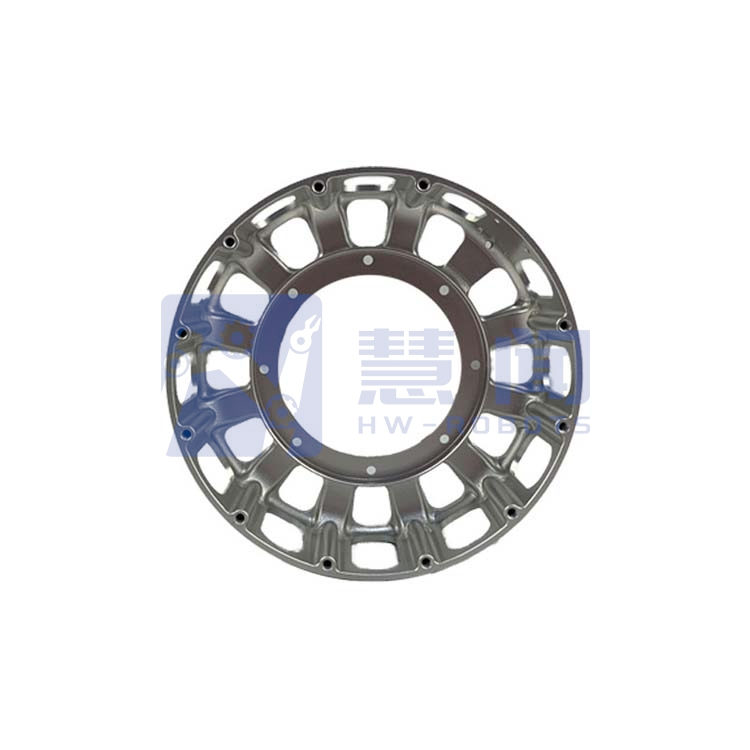
专业的工装设计是保证机器人零件加工精度的关键。在机械加工四足机器人部件时,应采用多点支撑的夹具系统,避免因夹紧力不均导致的局部应力集中。特别对于薄壁框架类零件,真空吸盘夹具往往比传统机械夹持更能均匀分布夹紧力。
零件加工完成后的应力释放工序同样重要。四足机器人的承重部件在精加工后建议进行振动时效或低温时效处理,这种方法能有效消除残余应力而不改变零件尺寸精度。机械加工行业实践证明,经过适当时效处理的机器人零件,在使用过程中的尺寸稳定性可提升30%以上。

质量检测与补偿加工
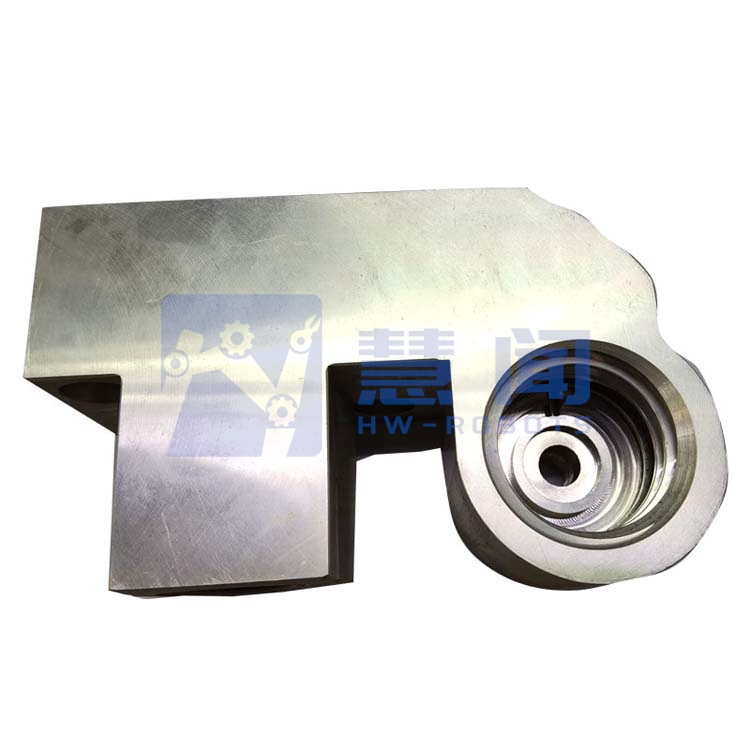
完善的检测体系是确保机器人零件加工质量的最后防线。对于四足机器人的关键部件,应采用三坐标测量机进行全尺寸检测,特别关注可能因应力变形导致的尺寸偏差。在零件加工流程中设置中间检测环节,可以及时发现应力变形问题并进行工艺调整。
当检测发现应力变形超出允许范围时,可采用补偿加工策略。通过分析变形规律,在后续机械加工中有预见性地调整加工余量分布,这种"以变制变"的方法在四足机器人大型结构件加工中取得了良好效果。机器人零件加工领域的研究表明,结合数值模拟的预测性补偿加工可将成品合格率提升至95%以上。
四足机器人零件加工是一项对精度要求极高的机械加工任务,通过科学的材料选择、优化的加工工艺、合理的工装设计以及严格的质量控制,完全可以有效规避应力变形问题。随着机器人技术的不断发展,零件加工工艺也将持续创新,为四足机器人提供更精密、更可靠的机械部件。只有掌握这些关键技术,才能在竞争激烈的机器人零件加工领域保持领先优势。